An Efficient and Continuous Approach to Information-Theoretic Exploration @ ICRA 2020 MIT LEAN 6:33 4 years ago 440 Далее Скачать
An Efficient and Continuous Approach to Information-Theoretic Exploration Theia Henderson 1:58 4 years ago 292 Далее Скачать
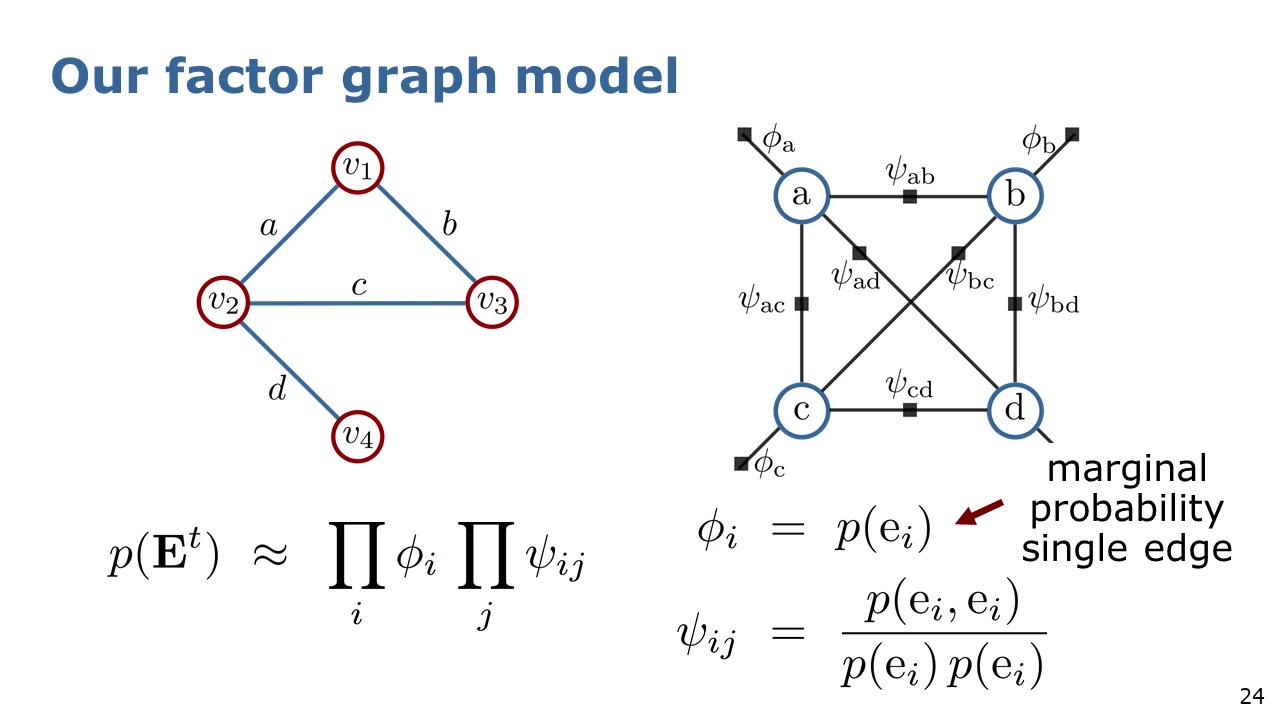
ICRA 2021 Talk: Exploring Large and Complex Environments Fast and Efficiently Ji Zhang 11:44 3 years ago 3 043 Далее Скачать
[ICRA 2020] The Soft-Landing Problem: Minimizing Foot Penetration Depth on Yielding Terrain Northwestern Robotics 10:00 4 years ago 1 516 Далее Скачать
Talk by L. Nardi on Long-Term Robot Navigation in Indoor Environments... (ICRA'20) Cyrill Stachniss 9:51 4 years ago 1 071 Далее Скачать
ICRA 2020: Highly Sensitive Bio-Inspired Sensor for Fine Surface Exploration and Characterization. CRISP - Queen Mary University of London 9:51 4 years ago 35 Далее Скачать
FSMI: Fast computation of Shannon Mutual Information for information-theoretic mapping @ ICRA 2019 MIT LEAN 2:35 5 years ago 479 Далее Скачать
ICRA 2020 Presentation: Active Reward Learning for Co-Robotic Vision Based Exploration WARPLab 10:00 4 years ago 421 Далее Скачать
A deep dive into L2X: Learning to Explain, An Information Theoretic Approach Procheta Sen 56:37 3 years ago 321 Далее Скачать
Real-time Information-Theoretic Exploration using Gaussian Mixture Models Resilient Intelligent Systems Lab 4:45 5 years ago 358 Далее Скачать
Information Theoretic Exploration in Signed Distance Fields Vijay Kumar 2:51 4 years ago 969 Далее Скачать
ICRA 2020 Video: A Generative Approach Towards Improved Robotic Detection of Marine Litter UMN IRV Lab 8:51 4 years ago 85 Далее Скачать
An obstacle-interaction planning method for navigation of actuated vine robots - ICRA 2020 Mario Selvaggio 10:00 4 years ago 154 Далее Скачать
ICRA 2020 - Presentation video SL1M for contact planning on uneven terrain Steve Tonneau 9:45 4 years ago 187 Далее Скачать
ICRA 2020 presentation: Self-Supervised Learning of State Estimation for Deformable Objects Mengyuan Yan 9:33 4 years ago 392 Далее Скачать